Lecture 6
Object-oriented Programming
Subclasses and inheritance II
MCS 275 Spring 2021
Emily Dumas
Lecture 6: Subclasses and inheritance II
Course bulletins:- Quiz 2 is due at Noon tomorrow (Tue Jan 26).
- Project 1 posted. Deadline 6pm CST on Fri Feb 5.
- Project 1 autograder opens on Mon Feb 1.
- Quiz 3 and Worksheet 4 will be lighter (so you can prioritize project work).
Plan
Finish our robot simulation class hierarchy
Discuss more OOP theory & practice
Planned Bot hierarchy
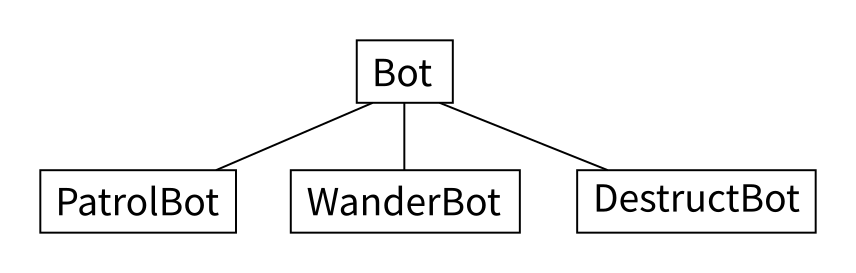
PatrolBotwalks back and forth.WanderBotwalks about randomly.DestructBotsits in one place for a while and then self-destructs.
Planned Bot hierarchy
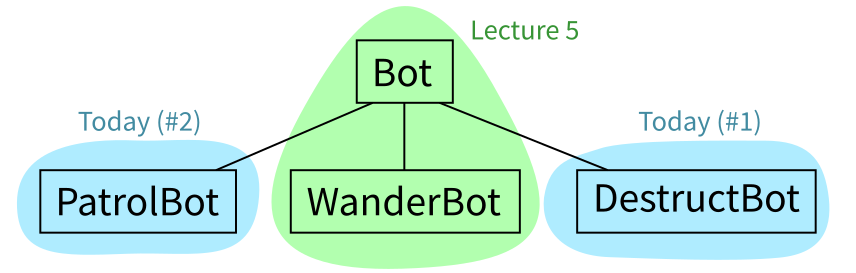
PatrolBotwalks back and forth.WanderBotwalks about randomly.DestructBotsits in one place for a while and then self-destructs.
Class attributes
Attributes declared in the class definition, outside of any method, are class attributes.
Class attributes are shared by every instance of the class. Often used for constants.
Contrast with the instance attributes we have used thus far (e.g. self.x = 1 in constructor) which exist separately for each instance.
Four pillars of OOP
- Encapsulation - Classes manage their own private, internal state.
- Abstraction - Method calls express intent (independent of implementation).
- Inheritance - Distinct classes can share behavior.
- Polymorphism - Code using a class will also work on its subclasses.
Extending the simulation
Beyond adding more robot types, how might me improve or extend the simulation?
Extending the simulation
Might create a class Arena that manages the list of bots and the space in which they move. Would have a single .update() method that updates all bots.
Arena could have a metthod to render itself as a string for display (or as a PNG, HTML, ...).
Extending the simulation
If we wanted to add robot interaction or movement constraints
then the Bot class would need a way to access information about its surroundings.
We might make a parent Arena a required argument to the Bot constructor.
Bot.update() could call methods of Arena to learn about other robots, movement limits, etc.
e.g. in Bot.update():
self.arena.bots_visible_from(self.position,self.sight_range)References
- I discussed inheritance in MCS 260 Fall 2020 Lecture 25, using "Square is a subclass of Rectangle" as an example in this geometric object module.
- See Lutz, Chapter 31 for more discussion of inheritance.
- Lutz, Chapters 26-32 discuss object-oriented programming.
Revision history
- 2021-01-25 Fixed typo
- 2021-01-23 Initial publication